Autonomous Over-Sand vehicle
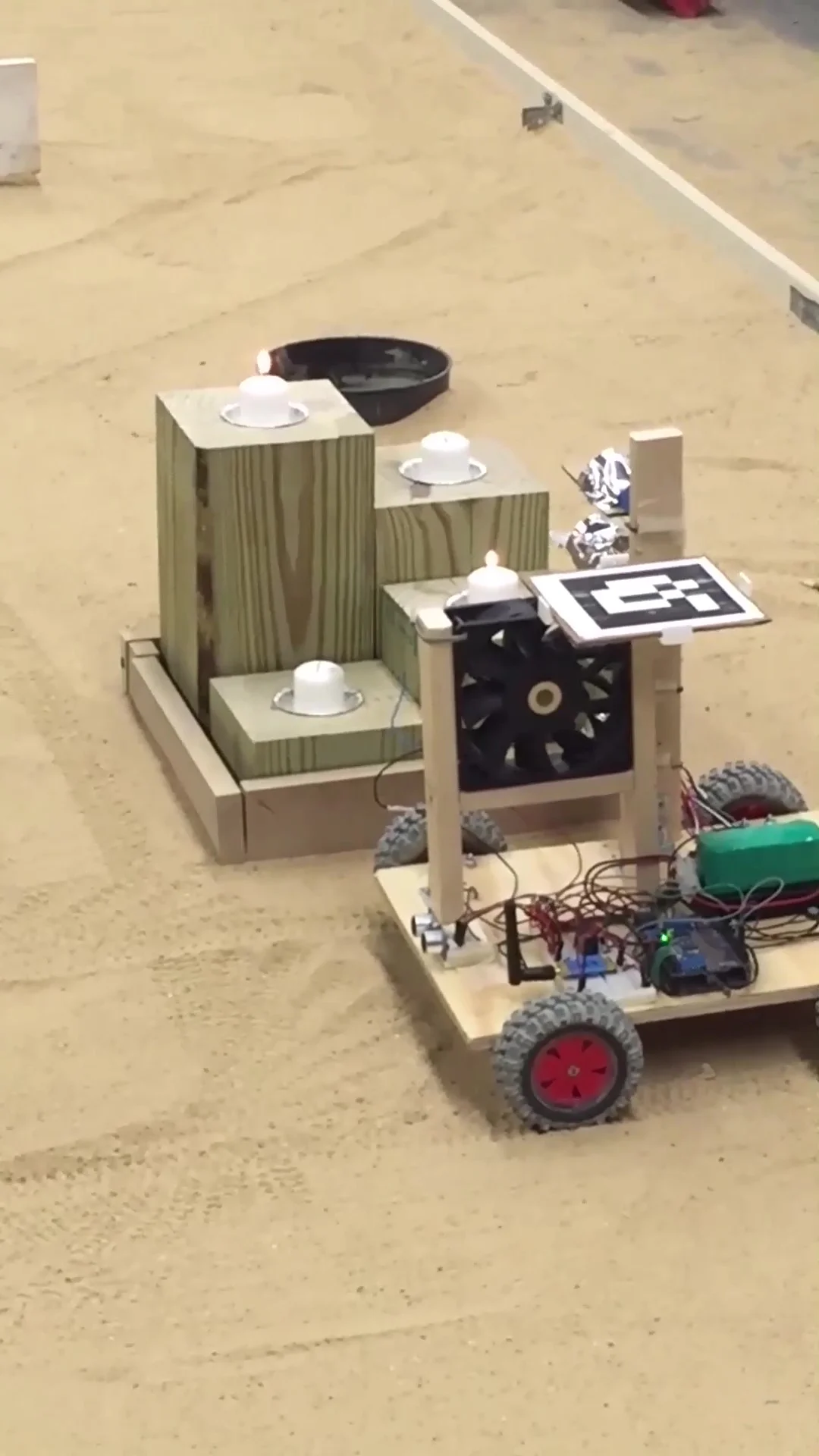
As part of an introductory engineering course, I was placed on a team of eight freshmen engineering students and tasked with designing and building an autonomous over-sand vehicle (OSV) that would accomplish a given mission. Our mission was to navigate the terrain to a site containing four candles on elevated platforms. From there, our vehicle was to detect which candles were lit, put them out, and confirm that all fires had been supressed.

design and Construction
I led the mechanical design and construction of our team's vehicle. This role required a great deal of problem solving and ingenuity. While most of the parts of the vehicle were off the shelf, with the exception of custom 3D printed wheel hubs, the design itself was only restricted by weight and footprint size requirements. Our design consisted of four wheels each with their own motor, flame and distance sensors, as well as a computer fan.
All aspects of the vehicle were operated autonomously by using an Arduino. In addition to leading the mechanical design, I assisted in developing mission specific algorithms such as navigation and fire detection.
Testing and results
Our vehicle proved to be able to successfully navigate sandy terrain to the fire site, correctly determine with candles were lit, and put out each of the fires within the time limit given.